A typical weather station uses mechanical anemometers a.k.a. wind cups to measure the windspeed. It's good for what it does, but can be bulky and cumbersome to maintain
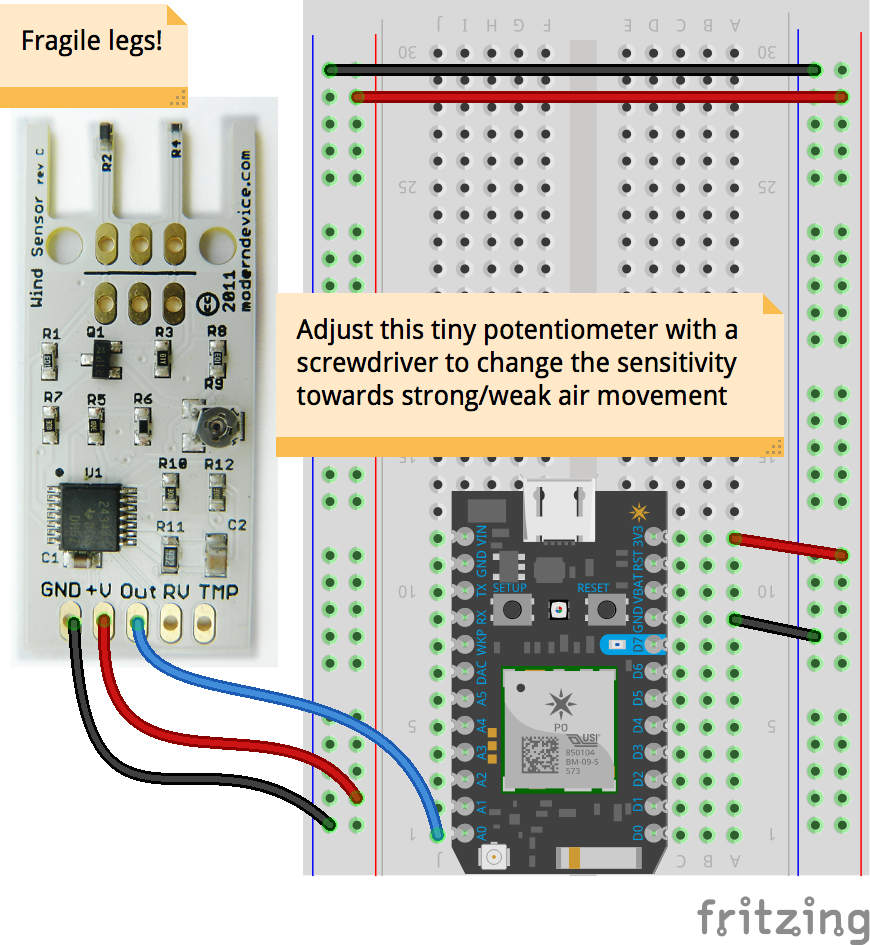
This specialised sensor from Modern Device is a compact, albeit more fragile approach to detecting windspeed. It's also sensitive enough to sense air movement by puffing our breath at it from about 30cm away, so again, it's all about experimenting with what these things can possibly sense.
For those of you keen on sensing air movement, it comes highly recommended. This version of the sensor is NOT temperature compensated, so it's great for sensing breath, small pufts of air, but not for recording actual wind speeds. You might want to investigate Revision P of the wind sensor, and follow up on the articles there to prototype your own anemometer.
This sensor is fragile! It's manufactured on an extremely thin PCB (0.5mm) to achieve it's thermal sensitivity, so be really careful with it. There's an alternative variant (revision P) but requires a higher voltage source to power, so stick with this model for an easy connection to the Photon.
// how long between each log update? feel free to change this value,
// but this must not be anything less than 1000 milliseconds!
#define INTERVAL_BETWEEN_LOGS 5000// initialise the timer
Timer dataTimer(INTERVAL_BETWEEN_LOGS, doDataUpdate);
// code in this setup function runs just once, when Photon is powered up or reset
voidsetup() {
Serial.begin(9600); // Open a connection via the Serial port / USB cable – useful for debugging
delay(5000); // Common practice to allow board to 'settle' after connecting online
dataTimer.start();
// note: analogue pins do not need to be initialised as they are INPUTs by default
}
// code in this loop function runs forever, until you cut power!
// for the A/D blackbox, there is nothing to do in here because data updates are handled by our timer
voidloop() {
}
// doDataUpdate runs every interval set in INTERVAL_BETWEEN_LOGS
voiddoDataUpdate() {
// IMPORTANT: to prevent server overload, the Particle cloud can only accept
// update rates of once per second, with the option to 'burst' 4 updates in a
// second (but then you'll get blocked for the next 4 seconds). 'Ration' your
// INTERVAL_BETWEEN_LOGS and the number of readings you are publishing; in our
// default example, we are frugally using just 1 publish, by concatenating
// all the data we want into a single publish statement
// first we save what we want to read into temporary variables first.
// feel free to add/remove these lines as you see fit in your application:
int A0State = analogRead(A0); // read an analogue range (0-4095) from A0
// now we form the concatenated string to put them all together. This String
// must NOT exceed 255 characters!
String output ="A0:"+ String(A0State);
// prints this out the Serial port (coolterm) for us humans to verify and
// debug; comment the next line if you don't want to see it in Coolterm
Serial.println(output);
// send it out (and have your IFTTT recipe ready to use it):
Particle.publish("sensorData", output);
}